

Устройство мостового крана в картинках
Содержание
- 1 Устройство мостового крана в картинках
- 1.1 Мостовой кран
- 1.2 Виды мостовых кранов
- 1.3 Классификация мостовых кранов
- 1.4 Общее устройство мостового крана
- 1.5 Видео обучающие
- 1.6 Кран мостовой магнитный г.п.30т с поворотной тележкой
- 1.7 Все про устройство мостового крана: от грузовой тележки до электрооборудования
- 1.8 Классификация
- 1.9 Два способа опирания на крановый путь
- 1.10 Конструкция мостового крана
- 1.11 Тип привода мостового ГПМ
- 1.12 Из чего состоит мостовой кран?
- 1.13 Схема управления мостовым краном
- 1.14 Монтаж мостового крана
- 1.15 Фото разных моделей
- 1.16 Подробное видео о мостовом кране
- 1.17 Мостовые краны — назначение, устройство, конструктивные особенности
- 1.18 Назначение и конструкция мостового крана
- 1.19 Устройство мостового крана
- 1.20 Мостовой кран:виды, устройство, схемы, фото
Мостовой кран
Это грузоподъемная машина, захватное устройство которой расположено на передвижной тележке (либо тали), в свою очередь перемещающейся по мосту. Последний представляет собой подвижную конструкцию, выполненную из высокопрочной стали. Мостовой кран может быть оснащен различными захватными механизмами: ковшом, магнитом, грейфером, устройством для подъема контейнеров и так далее.  Пик выпуска этих грузоподъемных машин пришелся на 80-е годы ХХ века: с конвейеров советских заводов ежегодно сходило по 6000-7000 моделей различной грузоподъемности.
Пик выпуска этих грузоподъемных машин пришелся на 80-е годы ХХ века: с конвейеров советских заводов ежегодно сходило по 6000-7000 моделей различной грузоподъемности.
С нулевых годов XXI века мостовые краны выпускаются в количестве до 1500 единиц (если считать производителей из всех стран бывшего Союза). Зато их делают специализированные заводы, разрабатывающие и предлагающие новые решения для специфических задач строительства.
Виды мостовых кранов
- Подвесные;
- Опорные;
- С креплением на двух балках;
- Однобалочный вариант.
Классификация мостовых кранов

Модели разделены по трем ключевым признакам.
По конструкции классифицируют:
- Опорные — краны, мостовая конструкция которых напрямую и сверху опирается на рельсовый путь, по которому она передвигается.
- Подвесные — модели, крепящиеся на рельсовый путь снизу, к его полкам.
- Козловые — краны, мост которых с помощью опор устанавливается на рельсовый путь.
По грузоподъемности выделяют модели:
- Первой группы — работающие с весом до 5 т;
- Второй группы — поднимающие до 50 т;
- Третьей группы — рассчитанные на вес до 300-320 т.
По назначению кланы классифицируют на:
- Общие — решают стандартные строительные задачи;
- Специальные — обеспечивают проведение специфических грузоподъемных операций.
По типу привода выделяют:
- Ручные — необходимо приводить в движение лебедку для выполнения рабочих задач.
- Электрические — функционируют без участия оператора, от сети.
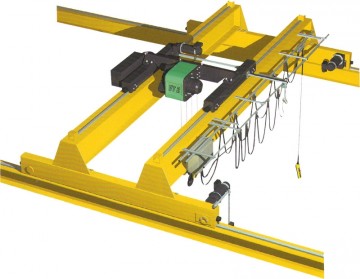
Общее устройство мостового крана
 Мостовая конструкция каждой модели очень проста: она представляет собой соединение двух пролетов коробчатого сечения с концевыми балками. Вместе они образуют рельсовый путь, с упорами-ограничителями на концах, для блокирования движения тележки.
Мостовая конструкция каждой модели очень проста: она представляет собой соединение двух пролетов коробчатого сечения с концевыми балками. Вместе они образуют рельсовый путь, с упорами-ограничителями на концах, для блокирования движения тележки.
У каждой пролетной балки есть по 2 горизонтальных пояса
На первый устанавливаются опорные краны, под второй монтируются подвесные. Также у пролетной балки есть большие и малые диафрагмы — для устойчивости и более равномерной передачи нагрузок. Чтобы можно было обслуживать мостовой кран, на пролетные балки монтируются специальные площадки.
По рельсовому пути перемещается тележка — в общем случае рама с закрепленными на ней механизмами передвижения и подъема грузов. Схемы сборки каждого узла обычно унифицированы.
Сама рама — это пересечение продольных и поперечных балок с настилом. Также тележка может быть оснащена буфером ограждения, ограничителями подъема крюка, линейкой для фиксации крайних положений. Обычно она весит от 0,2 до 0,4 грузоподъемностей (Q) мостового крана.

Тележка перемещается посредством механизма передвижения, оснащенного цилиндрическими колесами и сделанного по одной из унифицированных схем. У него может быть центральный привод сразу на оба колеса или раздельный на каждое, навесной редуктор и тормоз. И сами колеса могут быть не только цилиндрическими, но и коническими, устанавливаемыми вершиной как в наружную сторону, так и во внутреннюю (в последнем случае — только неприводные).
Видео обучающие
Кран мостовой магнитный г.п.30т с поворотной тележкой
Все про устройство мостового крана: от грузовой тележки до электрооборудования
В 80-е годы в СССР ежегодно производилось 6-7 тысяч подъемных кранов мостового типа. В 2000-е годы их выпуск в России сократился до 1000-1500 единиц техники.
Несложное устройство мостового крана позволяет широко использовать грузоподъемные машины (ГПМ) этого типа на разномасштабных предприятиях — от маленьких автомастерских до больших металлургических комбинатов или ТЭЦ.
Классификация

Используются мостовые краны для того, чтобы поднимать и перемещать тяжелые грузы больших размеров во всех сферах промышленной деятельности человека.
Технические характеристики мостовых кранов разрешают применять эту категорию ГПМ как для внутренней погрузки-разгрузки, так и для наружных работ в любых климатических условиях.
Недостаток мостовых ГПМ — в их стационарности, а плюс — в том, что они могут использовать строительную высоту здания.
Мостовые ГПМ делятся на 2 большие группы: общего назначения и специальные.
Мостовые ОПИ (общепромышленного исполнения) оборудованы грузовым крюком.
Специальные — оснащаются захватами, имеющими узкоспециализированное назначение: грейфер, магнит, захваты для контейнеров. Подъемники спец. назначения производят с поворотной тележкой или стрелой.
В отдельную группу выделяют металлургические ГПМ, предназначенные только для данной отрасли промышленности. Оснащаются такие ГПМ спец. захватами: литейными, ковочными, для раздевания слитков и др.
Два способа опирания на крановый путь

У двутавровой пролетной балки есть верхний и нижний горизонтальные пояса. На верхний размещают опорные, а под нижний крепятся подвесные:
- Опорные— устанавливаются колесами на рельсы сверху. Грузоподъемность опорных ГПМ — максимальна (до 500т), но постройка подкрановой эстакады или опор требует финансовых затрат.
- Подвесные— подцепляются к нижним полкам кранового пути. Этот вид опирания прост в монтаже и имеет невысокую стоимость. Небольшая грузоподъемность (до 8т) окупается малой высотой конструкции, из-за чего размер рабочей зоны больше, чем у опорных кранов.
Подвесные краны можно установить на часть цеха. Есть возможность стыковать краны (стыковой замок) и перемещать тележки с одного крана на другой.
Конструкции устройства бывают разными. Они могут двигаться поступательно или совершать обороты вокруг вертикальной оси (хордовые, радиальные и поворотные) ГПМ.
Конструкция мостового крана
По количеству главных балок конструкция ГПМ бывает:

- однобалочная. Используется на небольших производствах, может быть подвесным или опорным. Г/п 8 т.
Использование — в больших производственных цехах, в автомобильной, металлургической промышленности. Длина пролета — до 60м. Грузовая тележка может иметь вспомогательный грузоподъемный механизм помимо основного.
Тип привода мостового ГПМ

Привод механизмов у мостовых ГПМ может быть ручным или электрическим.
- Ручнойпривод. У этого мостового крана механизмом передвижения служат червячные тали.
Используют ручные ГПМ для подъема относительно небольших грузов, при производстве вспомогательных или ремонтных работ.
Из чего состоит мостовой кран?

Общее устройство мостового крана — это одно- или двухбалочный мост и грузовая тележка, которая по нему перемещается.
На мосту и на тележке размещается электрооборудование и основные узлы и механизмы.
Тормозная система
Стандартная система торможения для мостовых ГПМ — колодочная или диско-колодочная.
Функционально тормозные устройства кранов бывают стопорными — для остановки устройства — и спускными — замедляющими спуск.
Тормоза могут быть открытого или закрытого типов. Подъемные механизмы кранов оснащаются закрытыми тормозами — в нормальном положении механизмы заторможены, тормоз снимается только при запуске двигателя.
Тормоза закрытого типа используют в ГПМ потому, что они более долговечны, чем открытые и их поломку можно легко заметить.
Открытые тормоза в некоторых случаях монтируют дополнительно к закрытым (как вспомогательные) — для увеличения скорости и точности размещения грузов.
Подъемные механизмы

Механизм подъема и спуска груза тоже размещен на крановой тележке.
Состоит из приводного электродвигателя, трансмиссионных валов, горизонтального редуктора и грузовых тросов с барабаном для намотки.
Для работ с грузами >80 т применяется доп. редуктор мостового крана или понижающая зубчатая передача. Чтобы повысить тяговое усилие используют полиспаст (чаще всего сдвоенный кратный).
Редуктор мостового крана, его назначение и устройство

Функционально цилиндрические крановые редукторы можно разделить на:
- редукторы подъемных механизмов;
- редукторы движения тележек;
- редукторы движения мостов.
Редуктор может иметь 2 типа исполнения: развернутое и планетарное.
Редукторы развернутого типа, оснащенные цилиндрическими колесами более популярны. Ремонт и обслуживание механизмов этой конструкции проще и дешевле.
Подкрановые пути мостовых кранов

При устройстве кранового пути в качестве крановых и тележечных рельсов используют ж/д рельсы Р18, Р24, Р38 (узкоколейные) и Р43, Р50 и Р65 (для широкой колеи).
Также используют спец.крановые рельсы КР50, КР70, КР80, КРЮО, КР120, или же стальные направляющие квадратного сечения с закругленными краями (для механизмов г/п ≥ 20т).
В качестве крановых путей для подвесного типа ГПМ применяют двутавровые балки.
Крепления рельсов к балкам должны исключать смещение рельсов и должны позволять быструю замену изношенных рельсов. Их концы соединяют двусторонними накладками и болтами или сваривают.
Электрообрудование

К электрике мостовых ГПМ предъявляются особые, повышенные требования, что обусловлено напряженными режимами работы.
За 1 час может быть произведено сотни включений, выключений и перегрузок, связанных с разгоном, торможением устройства в целом или тележки.
Движение моста и крановой тележки, подъем и перемещение груза осуществляется основным электрооборудованием:
- электродвигатели. Устанавливаются 3 (4) двигателя, 2 из них размещены на тележке для подъема/спуска груза и движения тележки по балке моста, и 1 (2) двигателя перемещает балку крана по рельсам. В мостовых кранах для ОПИ используют прочные асинхронные электродвигатели, предназначенные для частых перегрузок и пусков серий МТ или МТК (для ненапряженной работы), трехфазного тока;
- контроллеры, реле управления, магнитные пускатели и другая аппаратура для того, чтобы управлять электродвигателями;
- электромагниты, толкатели и прочие устройства, задействованные в работе стопорных тормозов;
- ограничители грузоподъемности и прочие средства механической защиты.
Прожекторы, приборы рабочего и ремонтного освещения, обогрева, звуковая сигнализации, измерительная аппаратура — все это является вспомогательным электрооборудованием.
Подводится электропитание 2-мя способами: троллейными линиям или гирляндными кабельными системами:
- Троллейная линия — применяется в ГПМ большой грузоподъемности.
- Кабельная система. Гибкий эл.кабель, который подвешивается на специальные кабеленесущие каретки. Гирляндная система дешевле, ее монтаж и эксплуатация — легче, но она менее надежна.
Для перемещения балки моста применяется троллейная линия, а для крановой тележки — кабельная система.
Устройство крановой тележки мостового крана

Грузовая тележка производит подъем, спуск и перемещение груза вдоль моста.
На жесткой стальной раме с ведущими и ведомыми колесами установлены многочисленные крановые узлы.
Это приводы, электродвигатели подъемных механизмов (основного и вспомогательного), токосъемник, блокираторы высоты подъема.
Аварийную остановку тележки при поломке тормозной системы обеспечивают буфера.
Консольную тележку используют для однобалочных устройств. В двухбалочных применяют тележки, которые могут двигаться по обоим поясам балок (нижнему и верхнему).
Схема управления мостовым краном

Управляется ГПМ из подвесной кабины или с проводного (беспроводного) пульта, место расположения оператора — на полу цеха (земле) или вне рабочей площадки.
Монтаж мостового крана

Мостовой ГПМ требует доработки рабочей площадки – нужно проложить крановой путь.
Рельсовый путь может быть смонтирован на специальной крановой эстакаде, или для его постройки используется пол, колонны и опоры здания.
Есть 3 варианта монтажа:
- Поэлементный(пошаговый). Сборка крановых узлов происходит наверху на подкрановых путях.
- Крупноблочный— так называемая, укрупненная сборка. На высоту для монтажа поднимаются крупные фрагменты (механизмы, электрооборудование, узлы) крана, заранее собранные внизу.
- Полноблочный— полная сборка моста на полу. Конструкция поднимается целиком и монтируется на подкрановых путях. Для данного метода необходимо использование мощной техники.
Фото разных моделей
Вот так выглядят эти механизмы за работой:





Подробное видео о мостовом кране
Рассмотреть устройство в деталях можно на обучающем видео:
Мостовые краны — назначение, устройство, конструктивные особенности
В металлургии и строительстве, в производственном цеху и на складе, на транспорте и в ремонтных мастерских, при работе с сыпучими и опасными грузами, для перемещения крупногабаритных грузов, неразборных узлов и многого другого применяются мостовые краны. Эта техника предназначена для интенсивной работы в самых разнообразных, порой, экстремальных условиях.
Назначение и конструкция мостового крана
Для перемещения грузов по цеху, складу, иному производственному помещению служит мостовой кран. По проложенным по стенам подкрановым путям передвигается крановый мост с закрепленной на нем грузовой тележкой, осуществляющей подъем и опускание груза.
По конструкции моста краны разделяются на:
- Однобалочные. Мост состоит из одной балки двутаврового сечения, на концах которой установлены концевые балки с ходовыми колесами. В дополнение к основной грузовой тележке может устанавливаться дополнительная консольного типа. Краны этого типа отличаются небольшим весом, но и грузоподъемность у них, как правило, не превышает 10 т.
- Двухбалочные. Конструктивно мост составлен из двух жестких балок с концевыми балками, снабженными ходовыми колесами. Грузовая тележка помимо основного, может оснащаться и вспомогательными грузоподъемными механизмами. Этот тип кранов имеет большую грузоподъемность, управление осуществляется из кабины или дистанционно.
Схема мостового, подвесного крана 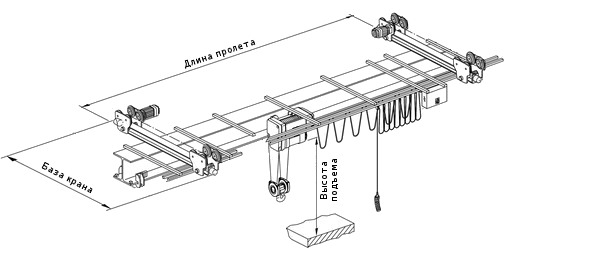
По типу крепления мостовые краны разделяют на 2 вида:
- Подвесные. Грузовая тележка перемещается по нижней плоскости балки моста.
- Опорные. Грузовая тележка перемещается по верхней плоскости опорной балки. Такая конструкция обеспечивает максимальную грузоподъемность.
Существует несколько типов мостовых кранов, отличных от традиционных, перемещающихся по параллельным подкрановым путям:
- Радиальный. Вращение крана осуществляется по кольцевому рельсу вокруг жестко закрепленной в центре рабочей площадки опоры.
- Хордовый. Передвижение осуществляется по кольцевому рельсу. В силу конструктивных особенностей, площадь обслуживаемого краном кольца меньше, чем у радиального при том же радиусе вращения.
- Кольцевой. Кран передвигается по двум кольцевым рельсам различного диаметра. Для исключения проскальзывания, ходовые колеса делают разного диаметра.
- Поворотный. Мост крана равен диаметру кольцевого рельса, по которому происходит перемещение. В отличие от радиального, отсутствует центральна опорная балка, и кран может выполнять погрузо-разгрузочные работы в любой точке внутри окружности, ограниченной подкрановыми путями.
Устройство мостового крана
Общее устройство мостового крана состоит из одно- или двухбалочного моста, перемещающейся по нему грузовой тележке. Как на мосту, так и на тележке установлено необходимое электрооборудование и механические узлы. Управляется механизм из подвесной кабины или с пульта, при нахождении оператора на полу цеха или вне рабочей площадки.
Монтаж подкрановых путей может осуществляться как на свободностоящей крановой эстакаде, так и с использованием пола, колонн, стропильных ферм цеха.
На фото устройство мостового крана 
Далее рассмотрим устройство различных механизмов мостового крана.
Тормозная система
Для удержания груза или контроля скорости его перемещения (спускной тормоз), остановки передвижения моста крана или грузовой тележки (спускной тормоз) служит тормозная система. Традиционно в подъемных механизмах используются замкнутые (закрытые) тормоза, блокирующие движение в нормальном состоянии. При нажатии на педаль или рукоять, механизм растормаживается. При аварийной ситуации, в случае поломки или остановки какого-либо узла крана, такой тормозной механизм автоматически срабатывает.
Более плавное и быстрое торможение обеспечивают колодочные тормоза.
Механизмы подъема
На крановой тележке расположен механизм подъема и опускания груза. В дополнение к основному, могут использоваться один или два вспомогательных механизма, грузоподъемность которых меньше грузоподъемности основного в 3-10 раз в зависимости от класса крана.
Составными частями любого из них являются:
- Приводной электродвигатель.
- Трансмиссионные валы.
- Редуктор.
- Грузовые тросы с барабаном для намотки.
Схема подъемного механизма мостового крана 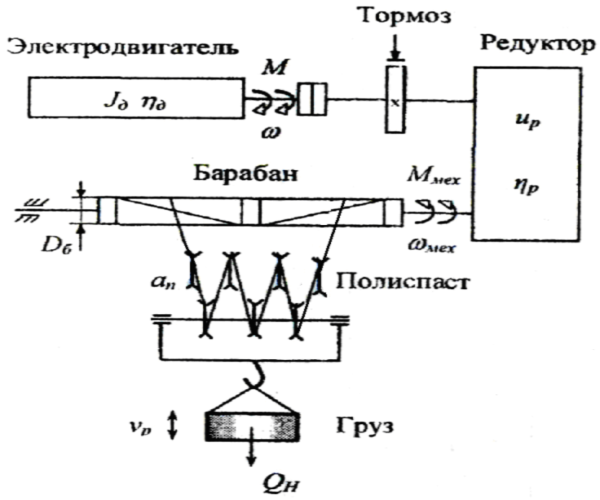
Для работы с грузами более 80 т используется дополнительный редуктор или понижающая зубчатая передача.
Для повышения тягового усилия применяется полиспаст, наиболее распространенной разновидностью которого является сдвоенный кратный. Благодаря ему трос наматывается равномерно на барабан с обоих концов, тем самым позволяя сбалансировать нагрузку на опоры барабана и всю пролетную часть моста.
Подкрановые пути
 Назначение подкрановых путей – обеспечить равномерное распределение веса мостового крана на фундамент и перемещение крановой балки по этим путям. Для опорных однобалочных кранов с небольшой грузоподъемностью в качестве направляющих используются обычные железнодорожные рельсы. Для механизмов грузоподъемностью 20 и более тонн используют специальные крановые рельсы. Основанием для них чаще всего является стальная двутавровая балка.
Назначение подкрановых путей – обеспечить равномерное распределение веса мостового крана на фундамент и перемещение крановой балки по этим путям. Для опорных однобалочных кранов с небольшой грузоподъемностью в качестве направляющих используются обычные железнодорожные рельсы. Для механизмов грузоподъемностью 20 и более тонн используют специальные крановые рельсы. Основанием для них чаще всего является стальная двутавровая балка.
Учитывая вес самого крана и груза, а также скорость перемещения по подкрановым путям, к качеству их установки должны применяться повышенные требования, исключающие возможность схода крана с рельсов. Для того, чтобы предотвратить это, ширина колес должна превышать ширину используемых рельсов. Так, при использовании цилиндрических колес, их ширина должна быть больше ширины рельса на 30 и более мм. Для конических колес это значение должно быть не менее 40 мм.
Укладка рельсов должна производиться с тепловым зазором, а также обеспечиваться перепад высот на них не более 2 мм. При больших значениях возникает сильная ударная нагрузка на колеса.
Электрообрудование
К электрооборудованию мостовых кранов предъявляются особые требования, среди которых режим работы, при котором в течение часа может производиться до нескольких сотен кратковременных включений и выключений, перегрузки, возникающие при разгоне и торможении крановой тележки и самого крана, изменение скоростей передвижения.
Перемещение моста и грузовой тележки, манипуляции с грузом обеспечивает основное электрооборудование мостового крана.
К электрооборудованию относятся:
- Электродвигатели. Устанавливаются 3 или 4 двигателя, 2 из которых смонтированы на тележке для осуществления подъема/опускания груза, перемещения ее по балке моста, и 1 или 2 двигателя обеспечивают перемещение балки крана по подкрановым путям.
- Управляющая аппаратура (реле, контроллеры, пускатели и т.д.).
- Устройства электрозащиты (предохранители, автоматические выключатели и т.д.).
- Устройства, обеспечивающие работу тормозной системы крана.
Электросхема мостового крана 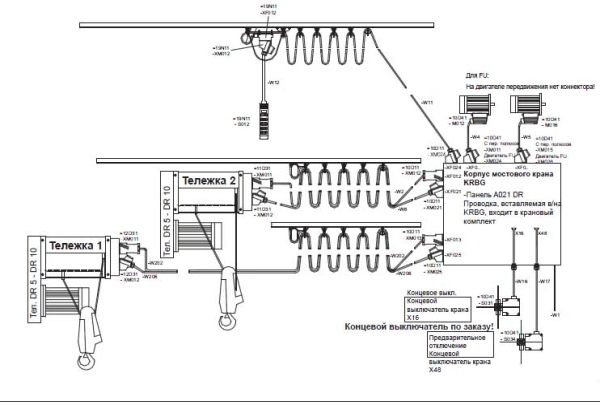
К вспомогательному электрооборудованию относятся осветительные приборы, системы отопления кабины, звуковая и проч. сигнализация, и т.п.
Электропитание крана обеспечивается двумя способами:
Чаще всего для перемещения балки моста используется первый способ, а для грузовой тележки применяется второй.
Устройство тележки
Функции подъема и опускания груза, а также перемещение его вдоль моста выполняет грузовая тележка. Ее конструкция делается такой, чтобы не допустить неравномерной нагрузки на ходовые колеса, а также и на балки моста.
Устройство тележки представляет собой жесткую стальную рама, имеющую ведущие и ведомые колеса. На раме смонтированы приводы и электродвигатели механизмов основного и, в случае применения, вспомогательного подъемов, токосъемник, блокираторы высоты подъема и прочие узлы, необходимые для работы крана.
В однобалочных кранах чаще используется консольная тележка. В двухбалочных используются тележки, способные передвигаться как по нижнему, так и по верхнему поясу балок.
Крюковая и грейферная тележки мостовых кранов 
В зависимости от установленного на кране оборудования, тележка может быть оснащена несколькими барабанами: для наматывания кабеля, питающего электромагнит, для троса замыкающего механизма грейфера и т.д.
Мостовой кран отличается высокой грузоподъемностью, надежностью, способностью работать как при низких, так и при очень высоких температурах, там, где его невозможно заменить другим видом подъемных механизмов.
На видео принцип работы двухбалочного мостового крана:
Мостовой кран:виды, устройство, схемы, фото


Электрические схемы бывают принципиальные или элементные, монтажные или маркированные. Принципиальные схемы отражают взаимодействие элементов электрооборудования, указывают последовательность пппупжирния тпкя по силовым цепям и аппаратам
управления. Пользоваться принципиальными схемами удобно при ремонте и наладке. Аппаратура в них просто и четко разбита на отдельные самостоятельные цепи, и они легко запоминаются. Электрические цепи на принципиальных схемах подразделяются на силовые, изображаемые толстыми линиями, и цепи управления, выполненные тонкими линиями. На монтажных или маркированных схемах в отличие от принципиальных изображают электрическую проводку крана и взаимное расположение электрооборудования.
Электрическая защита. В качестве электрической защиты, как уже отмечалось выше, применяются защитные панели ПЗКБ-160 и ПЗКН-150. Некоторые заводы выполняют защитные панели собственной сборки. Независимо от этого каждая такая сборка представляет собой укомплектованную панель, на которой смонтированы: трехполюсный рубильник, предохранители цепи управления, трехполюсный контактор, реле максимального тока, контактные зажимы цепей управления и линейных проводов, пусковая кнопка и трансформатор цепей управления.
Рекламные предложения на основе ваших интересов:
Рассмотрим электрическую схему защитной панели ПЗКБ-160 (рис. 36). Цепь управления показана тонкими линиями, силовая цепь — жирными линиями. Пояснение схемы силовой цепи будет дано ниже. В данный момент рассмотрим схему цепи управления без элементов, расположенных правее пунктирной линии, соединяющей точки.
Из приведенной схемы видно, что подача напряжения к катушке контактора Л возможна после нажатия на кнопку KB, когда рукоятки всех контроллеров КП, КТ, КМ поставлены в нулевое положение, включен аварийный выключатель АВ, замкнуты контакт люка КЛ, контакт дверей кабины КД, включена ключ-марка КМ и замкнуты контакты максимального реле MP. После включения линейного контактора Л замыкаются его блок-контакты Л в цепи управления, шунтирующие кнопку КВ. При этом создается замкнутая цепь: провод Л1, катушка Л, контакты MP, КМ, КД, KЛ, АВ, КМ, КВМН, КВТН, КТ, КП, блок-контакт Л, провод Л2.
При выводе контроллеров из нулевого положения в рабочее цепь не размыкается, так как ток проходит не через нулевые контакты контроллеров, а через цепь с блок-контактом Л, и катушка линейного контактора запитывается по параллельной цепи.
Рис. 1. Электрическая схема защиты кранов.
Вторая замкнутая цепь образуется при включении контакторов ВМ или НМ, что осуществляется контактами контроллера передвижения К11М или К9М. При этом в цепи размыкаются контакты взаимной блокировки НМ или ВМ, предохраняющие от одновременного включения этих контакторов.
При срабатывании конечных выключателей механизма передвижения моста КВМН, КВМВ линейный контактор Л не отпадает, а отключается только контактор направления ВМ или НМ и механизм передвижения останавливается. Линейный контактор отключится при срабатывании любого другого концевого выключателя или прибора безопасности. В этом случае отключаются контакты Л в силовой цепи и механизмы обесточиваются. Для пуска рукоятки контроллеров необходимо снова поставить в нулевое положение и нажать на кнопку КВ.
Реверсирование. Для реверсирования, т.е. изменения направления вращения двигателей, применяют контакторы или реверсивные магнитные пускатели. На рис. 37, а показана схема реверсивной контакторной панели, а на рис. 2 — схема реверсивного магнитного пускателя. Для реверсирования двигателей достаточно двух двухполюсных контакторов. При повороте рукоятки контроллера подается напряжение в цепь управления и включается катушка, которая замыкает верхнюю пару контактов линии 1-11 и 3-12. При этом двигатель вращается в направлении Вперед. При подаче напряжения в цепь управления, что соответствует повороту контроллера в противоположную сторону, включаются катушка Я и нижняя пара силовых контактов, замыкая линии 1-12 и 3-11. В этом случае двигатель вращается в направлении Назад.
Рис. 2. Схема реверсирования. а — с помощью контакторной панели: б — с помощью магнитных пускателей.
Реверсивный магнитный пускатель состоит из двух трехполюсных пускателей, имеющих взаимную механическую и электрическую блокировку. При замыкании контактов универсального переключателя VII включается катушка В пускателя и соответствующими силовыми контактами В замыкаются линии 1-12, 2-13, 3-11. Двигатель вращается в одну сторону. При включении катушки Н замыкаются линии 1-11, 2-13, 3-12, что вызывает изменение порядка чередования фаз электродвигателя, поэтому он вращается в противоположную сторону.
Управление электроприводом. Как указывалось выше, для смягчения пусковых характеристик механизмов применяют пусковые резисторы.
Пусковыми резисторами управляют: – прямым способом, при котором цепи сопротивлений подключаются непосредственно к зажимам контроллера, установленного в кабине крана; – дистанционным способом, когда цепи резисторов включаются контакторами магнитной панели, управляемой с помощью командоконтроллера, установленного в кабине.
На рис. 3 приведена схема управления электроприводом крана прямым способом. На схеме показаны контроллер КМ типа ККТ-62А, два пусковых резистора ПС1 и ПС2 типа НФ-2А, два двигателя Ml и МЗ и два электрогидротолкателя тормоза М2, М4. На первой позиции контроллера обмотки роторов замыкаются на полный комплект сопротивлений, на второй позиции включаются контакты контроллера, часть резистора отключается. Двигатель переходит на более жесткую характеристику, его частота вращения возрастает и т. д. На пятой позиции контроллера все резисторы отключены, обмотки роторов замкнуты накоротко, двигатели работают на естественных характеристиках, где скорость достигает наибольшего значения.
В качестве примера дистанционного способа регулирования пуска электродвигателя с фазным ротором на рис. 4 приведена электрическая схема управления механизма передвижения. Управляют пуском электродвигателя и регулируют частоту вращения в этом случае с помощью контроллера КК типа ККТ-61А. Однако здесь контроллер работает в цепи управления как командоконтроллер, а пускорегулирующие резисторы коммутируют с помощью магнитного контроллера. При включении рубильника В напряжение через катушки реле максимального тока РТ1 и РТ2 подается к неподвижным контактам контакторов К1 и К2. На нулевой позиции ком андоконтроллера КК втягивающая катушка промежуточного реле Р1 получает питание по цепи: провод 010, замкнутые контакты КК, УП1, РТ1, РТ2, УП1, провод 037. Реле Р1 замыкает свои контакты в цепях 020-023 и 025-036.
Рис. 3. Схема управления электроприводом крана прямым способом.
Рис. 4. Схема управления электроприводом дистанционным способом. а — силовая цепь; б — цепь управления.
При установке рукоятки командоконтроллера КК на первую позицию положения Вперед замыкается контактор К1 — При этом включаются электродвигатели Ml, МЗ, М5 и М7 механизма передвижения и М2, М4, Мб, М8 гидротолкателей тормозов. При переводе командоконтроллера на вторую позицию питание получает катушка контактора Кб, который замыкает секции пусковых резисторов в цепях роторов двигателей передвижения. Дальнейший поворот рукоятки контроллера последовательно включает катушки контакторов К7, К8 и К9. На последней позиции все сопротивления зашунтированы, т.е. роторы электродвигателей замкнуты накоротко, поэтому двигатели работают на естественных характеристиках. При переводе рукоятки командоконтроллера КК в сторону Назад на первой позиции включается катушка контактора К2. В результате изменения порядка подключения фаз двигатели вращаются в обратную сторону.
При срабатывании каждого из реле РТ1 и РТ2 на любой позиции контроллера размыкается размыкающий контакт одного из этих реле, катушка Р1 окажется обесточенной и разомкнет свои контакты в цепи катушек K1, К2. Силовая цепь окажется разомкнутой, кран остановится. Дальнейший пуск электропривода станет возможным только после возвращения рукоятки командоконтроллера в нулевое положение.
Особенности управления магнитным контроллером типа ТСАЗ-160. У магнитных контроллеров ТСА и КС первое и второе положения контроллера служат для спуска с пониженной скоростью грузов выше 50% от номинального. При этом на первом положении спуска возможна работа только с номинальным грузом. Для спуска тяжелых грузов на первом и втором положениях необходимо включить педаль НП. Тогда в первом положении включается реле 1РУ, 2РУ. Включатся при нажатой педали и контактор противовключения П, контактор В, контактор пуска КП, контактор тормоза Т и реле блокировки РБ.
При втором положении командоконтроллера контактор П противовключения отключается. На первом и втором положениях двигатель работает в режиме противовключения.
Груз массой, меньшей 50% номинального, на первом и втором положениях командоконтроллера опускаться не будет. Его опускание возможно только в третьем положении командоконтроллера. В третьем положении командоконтроллера включаются контакторы Н и О. Это вызывает включение двигателя в режим однофазного торможения. Контакторы Я и О включают реле блокировки РБ, которое включает контактор Т — механизм растормаживается. Цепь контакторов В и КП разорвана блок-контактами Я и О. В этом же положении последовательно включаются контакторы 1У, 2У. Контактор 2У разрывает цепь реле 1РУ, которое в свою очередь включает с выдержкой времени контакторы ЗУ и 4У, т.е. заворачиваются пусковые резисторы.
Рис. 5. Принципиальная схема электропривода подъема с магнитным контроллером ТСАЗ-160. а — силовая цепь; б — цепь управления; М двигатель; ТМ — тормозной магнит; Т — контактор тормозного магнита; КП- контактор пуска; В, Н- контакторы направления вращения двигателя; О — контактор однофазного торможения; П — контактор противовключения; 1У-4У- контакторы ускорения; MP — реле максимального тока; РБ — реле блокировочное; 1РУ, 2РУ — реле ускорения; КВВ, КВН — конечные выключатели; ВС — выпрямитель селеновый; R1-R2 — добавочные резисторы; НП — ножная педаль; Р — рубильник; 1П, 2П — предохранители.
В четвертом положении контроллера контактор О отключается. Контакторы ускорения 1У — 4У включены, все резисторы выведены. Контакторы Я, КП, Т и реле блокировки РБ включены. Осуществляется спуск груза со сверхсинхронной частотой вращения двигателя.
При медленном переводе рукоятки командоконтроллера с третьего положения во второе и первое легкий груз в этом случае неизбежно пойдет вверх, так как включится контактор В, который в свою очередь включает КП, затем Т и РБ. На первом положении дополнительно включится. Данная схема позволяет крановщику выбрать соответствующее грузу положение коман-доконтроллера.
Рекламные предложения:
Читать далее: Рекомендуемые изменения в электрических схемах кранов
Категория: — Электрическое оборудование
Главная → Справочник → Статьи → Форум
«Машинист мостового крана»

