Электрическая схема кран балки с описанием
Содержание
- 1 Электрическая схема кран балки с описанием
- 1.1 Принцип действия электрической кран-балки
- 1.2 Описание работы электрической схемы
- 1.3 Управление лебедкой
- 1.4 Управление тельфером
- 1.5 Управление мостом кран-балки электрической
- 1.6 Электропривод электрических талей и кран-балок
- 1.7 Электрическая схема кран-балки
- 1.8 Электросхема кран-балки
- 1.9 Онлайн журнал электрика
- 1.10 Статьи по электроремонту и электромонтажу
- 1.11 Электропривод электрических талей и кран-балок
Принцип действия электрической кран-балки
Кран-балка электрическая — это устройство, монтируемое под потолком в здании цеха для транспортировки тяжелых грузов. Сама кран-балка — довольно простое устройство. Ниже будет изложен принцип ее действия и устройство. Приведенная схема – типовая, но как основа подойдет для любого подобного оборудования. Электрическая схема подключения кран-балок зависит от метода подачи питания к механизму. Она может быть проводной или щеточной.
Описание работы электрической схемы
Начнем работу на нашей кран-балке, подав питание на схему управления, включив выключатель QS1. Обычно QS1 — это выключатель под ключ, предназначенный для недопущения неквалифицированных лиц к работе с грузоподъемным механизмом. После включения цепи управления приступим к работе с механизмом.
Схема электрической кран-балки представлена далее.
Управление лебедкой
При нажатии кнопки SB1 питание проходит через реле тока, нормально замкнутые контакт концевого выключателя и контакт пускателя КМ2, включает электромагнит пускателя КМ1. Пускатель КМ1 подает питание на двигатель М1, вследствие чего включается подъем груза. Реле тока (РТ) необходимо для того, чтобы не допустить длительной работы двигателя в режиме перегрузки. Концевой выключатель необходим для остановки вращения при достижении крюком предельного верхнего положения во избежание вывода из строя лебедки или ее привода. Питание пускателя КМ1 пропущено через нормально замкнутый контакт пускателя КМ2 во избежание их одновременного включения. Если этого не сделать, то, если будет включено одновременно 2 пускателя, произойдет короткое замыкание в силовой части цепи на местах прилегания контактных групп, что выведет их из строя. Такие схемы включения пускателей между собой называются схемами взаимоблокировки.
Для того чтобы опустить груз, нажмем кнопку SB2. При ее нажатии ток проходит через нормально замкнутый контакт концевого выключателя предельно нижнего положения. И нормально замкнутый контакт пускателя КМ1, проходя через катушку пускателя КМ2, запускает обратное вращение. Концевой выключатель необходим для избегания перематывания троса.
Управление тельфером

Для перемещения тельфера кран-балки электрической, условно говоря, влево, нажмем кнопку SB3. Ток пойдет через нормально замкнутый контакт концевого выключателя, расположенного на левой крайней точке тельфера. При достижении тельфером предельного левого положения (столкновения с резиновым буфером) он разорвет питание пускателя КМ3 во избежание перегрузки электродвигателя и чрезмерного износа колес вследствие их прокручивания на месте. Питание пускателя КМ3 также обеспеченно через нормально замкнутый контакт пускателя КМ4 с той же целью защиты пускателей от одновременного включения.
Для перемещения тельфера, условно говоря, вправо, нажмем кнопку SB4. Питающее напряжение поступит на нормально замкнутый контакт концевого выключателя, а пройдя через него, поступит на нормально замкнутый контакт пускателя КМ3, и только после этого запитает катушку электромагнита КМ4, который включит обратное вращение двигателя. При столкновении правой крайней точкой с правым буфером концевой выключатель разорвет питание пускателя, вследствие чего вращение колес прекратится.
Управление мостом кран-балки электрической

Для включения хода моста вперед нажимаем кнопку SB5. Питание пускателя обеспечено аналогичным образом, как и в предыдущих функциях для обеспечения тех же защит. Таким же образом работает и ход моста назад.
По окончании работы с механизмом ключ повернуть в положение «ВЫКЛ.» и извлечь из замка. При попытке включить любую из функций электрической кран-балки механизм останется неподвижным.
В заключение можно сказать, что кран-балка — одно из самых простых устройств, но оно сильно облегчает труд обычного рабочего.
Электропривод электрических талей и кран-балок
 Подвесные электротележки (электрифицированные тали, тельферы и кран-балки) применяют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах внутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что сокращает размеры промышленных зданий, а их обслуживание не требует квалифицированного персонала.
Подвесные электротележки (электрифицированные тали, тельферы и кран-балки) применяют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах внутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что сокращает размеры промышленных зданий, а их обслуживание не требует квалифицированного персонала.
Подвесные электротележки предназначены для подъема и перемещения грузов на производственных объектах по строго определенному пути.
Подвесная электротележка (рис. 1) состоит из 3 основных частей: грузоподъемного механизма (электроталь), предназначенного для подъема (опускания) и удержания груза, механизма передвижения (ходовая тележка), предназначенного для перемещения поднятого груза в строго определенном направлении, монорельса, определяющего горизонтальное движение в двух направлениях.
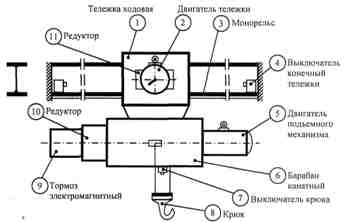
Рис. 1. Кинематическая схема подвесной электротележки
Электроталъ смонтирована на ходовой тележке и включает следующее оборудование: электродвигатель (5) подъемного механизма, редуктор (10) цилиндрический, для снижения частоты вращения электродвигателя до величины, обеспечивающей заданную линейную скорость подъема (опускания) крюка, электромагнитный тормоз (9), для затормаживания вала двигателя при отключении его от сети или исчезновения напряжения в сети, применяется колодочный тормоз, работающий от усилия пружин при охвате вала колодками, выключатель конечный (7) крюка, для ограничения подъема крюка, при нажатии на него двигатель отключается от сети и затормаживается, барабан канатный (6), для сматывания (разматывания) и хранения каната, крюк (8), для крепления поднимаемого груза.
Ходовая тележка смонтирована на монорельсе (3), опирается ходовыми колесами на нижние полки двутавровой балки. Привод на колеса через цилиндрический редуктор (11) от электродвигателя (2).
Монорельс — двутавровая балка с конечными выключателями (4) на концах, для ограничения горизонтального хода.
Электроталь ТЭП-1 (грузоподъемность 1 т, напряжение 380 В) состоит из механизмов подъема и передвижения с индивидуальными электроприводами. Рабочий барабан 2 приводится двигателем 20 через планетарный редуктор, образованный из сателлитов 5, 7, 8, блочных шестерен 13, солнечных шестерен 6, 9, водил 14, 15. Главный приводной вал 4 при отключенном двигателе затормаживается дисками 10 под действием пружины 11.
Для привода механизма подъема груза со скоростью 6,5 — 6,9 м/с применяется асинхронный двигатель с повышенным скольжением типа АОС-32-4М (мощность 1,4 кВт при 1320 об/мин и ПВ = 25%). Движение крюка вверх ограничивается конечным выключателем.
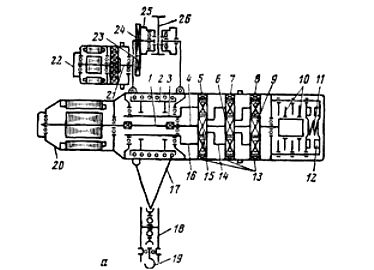
Рис. 2. Электропривод электротали ТЭП-1: 1 — рабочий барабан, 3 — полый вал, 4 — рабочий вал, 5, 7, 8 — сателлиты, 6, 9, 15 — солнечные шестерни, 10 — тормозные диски, 11 — тормозная пружина, 12 — электромагниты, 13 — блочные шестерни, 14, 16, 21 — водила, 17 — трос, 18 — подвеска, 19 — крюк, 20 — электродвигатель подъема груза, 22 — электродвигатель тележки, 23, 24 — шестерни, 25 — каток, 26 — монорельс.
На рисунке 3 показаны рабочие характеристики тали. КПД электротали возрастает до 0,58 с увеличением массы поднимаемого груза до 1000 кг.
Интересен режим работы двигателя 4 при опускании груза: пока масса груза менее 425 кг, электродвигатель работает в двигательном режиме, а когда масса свыше 425 кг — в генераторном. Следовательно, для преодоления момента холостого хода механизма подъема достаточен груз массой 425 кг.
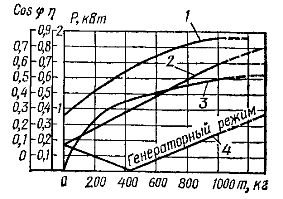
Рис. 3. Рабочие характеристики электрической тали: 1 — со s фи электродвигателя, 2 — мощность электродвигателя при подъеме груза, 3 — КПД, 4 — мощность электродвигателя при опускании груза.
Для привода ходовой тележки электротали применен асинхронный электродвигатель 22 (рис. 2) типа ТЭМ- 0,25 (мощность 0,25 кВт при 1410 об/мин и ПВ = 25%) со встроенным планетарным одноступенчатым редуктором и шестеренчатой передачей 23, 24, передающей вращение на катки 25. На механизмах передвижения простейших талей тормозные устройства не устанавливают. Передвижение тали по балке в обе стороны ограничивают механические упоры.
 Кран-балка отличается от тали тем, что балка, по которой передвигается таль, может перемещаться вдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым или фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Кран-балка отличается от тали тем, что балка, по которой передвигается таль, может перемещаться вдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым или фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Для привода подвесных электротележек применяются трехфазные асинхронные двигатели с короткозамкнутым ротором и лишь при большой грузоподъемности и необходимости регулирования скорости и плавной «посадки» грузов — асинхронные двигатели с фазным ротором.
Из-за отсутствия низкой скорости, необходимой для плавной посадки грузов или точной остановки кран-балки, рабочему приходится периодически включать и отключать электродвигатели, а это увеличивает число включений и вызывает нагрев обмоток, а также снижает износостойкость контактов. Поэтому на некоторых кран-балках имеются электроприводы подъема и передвижения с двумя рабочими скоростями: номинальной и пониженной, которые обеспечиваются использованием двухскоростных асинхронных двигателей вместо односкоростных или дополнительного микроривода.
 Подвесными электротележками с небольшой скоростью перемещения (0,2 — 0,5 м/с), имеющими привод от двигателей с короткозамкнутым ротором, обычно управляют с уровня пола (земли) при помощи подвесных кнопочных станций. В подвесных тележках и кран-балках с кабиной для оператора (при скорости движения 0,8 — 1,5 м/с) двигателями с фазным ротором управляют с помощью контроллеров.
Подвесными электротележками с небольшой скоростью перемещения (0,2 — 0,5 м/с), имеющими привод от двигателей с короткозамкнутым ротором, обычно управляют с уровня пола (земли) при помощи подвесных кнопочных станций. В подвесных тележках и кран-балках с кабиной для оператора (при скорости движения 0,8 — 1,5 м/с) двигателями с фазным ротором управляют с помощью контроллеров.
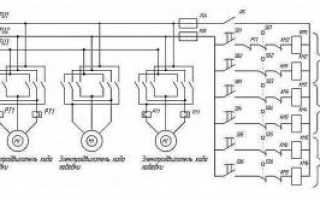
Электродвигателями талей и кран-балок управляют при помощи реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле. Напряжение к катушкам и контактам контакторов подъема КМ1 (рис. 4), спуска КМ2, передвижения вперед КМЗ и назад КМ4 подводится через автоматический выключатель и кабель или контактные провода. Движение подъемного устройства вверх ограничивает конечный выключатель SQ .
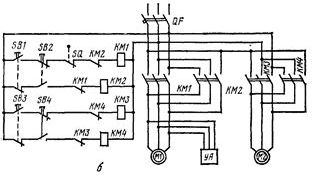
Рис. 4. Схема электрическая принципиальная кран-балки
Блокировка реверсивных контакторов двигателей от одновременного включения осуществляется двухцепными кнопками и механической блокировкой самих контакторов (или размыкающими блок-контактами контакторов).
На электроталях и кран-балках не применяют шунтирование пусковых кнопок соответствующими замыкающими блокировочными контактами контакторов, предотвращая вероятность продолжения работы тали после отпускания оператором подвесной кнопочной станции. Одновременно с двигателем подъема включается электромагнит УА, размыкающий тормоз.
Максимально допустимое время пуска для механизмов подъему составляет 3 — 5 с, для механизмов передвижения — 10 — 15 с.
Режим работы двигателей подвесных электротележек, электроталей и кран-балок зависит от их назначения. Если грузы перемещают к мостовым кранам на небольшие расстояния, то двигатели работают в позорно-кратковременном режиме (например, у тележек, обслуживающих участки цехов или складов).

Для кран-балок транспортирующих грузы по территории завода на относительно большие расстояния, режимы работы двигателей подъема и перемещения различны: для первых характерен кратковременный режим, для вторых — длительный. Мощность двигателей подъема и перемещения электроталей, тельферов и кран-балок определяется так же, как для двигателей механизмов мостовых кранов.
Электрическая схема кран-балки
Кран-балки использует в закрытых помещениях, в ангарах и доках. Техника используется для выполнения погрузочно-разгрузочных работ, монтажа различных конструкций. Наибольшей популярностью пользуются модели с электроприводом, обеспечивающие высокую производительность и комфорт рабочего процесса.
Электрическая схема кран-балки показывает схему подачи питания от энергоузлов на двигатель подъемного оборудования, взаимную связь основных узлов механизма.
Электросхема кран-балки
Принципиальная электрическая схема кран-балки для любой модели включает в себя редуктор, барабан и электропривод.
Редуктор отвечает за понижение или повышение поворотов в процессе работы.
Как на большинстве мостовых кранов, на кран-балках используется барабан, наматывающий грузовой трос для поднятия груза на нужную высоту.
Двигатель является центром любой электрической тали и тельфера. Мощность мотора рассчитывается с учетом веса конструкции и стоящих перед грузоподъемным устройством задач.

Рис. 1. Электрическая схема кран-балки с описанием
На рисунке 1 изображена стандартная электросхема для кран-балки. Контроль за электродвигателем осуществляется с помощью реверсивных магнитных пускателей и программных кнопок, соединенных с приводом гибким кабелем.
Питание на обмотки и контакты контакторов для поднятия (КМ1) и опускания (КМ2), а также для перемещения вперед (КМЗ) и назад (КМ4) подается через гибкий кабель, на котором установлен выключатель, автоматически прекращающий подачу тока при высокой нагрузке на электросеть.
Ограничитель SQ тормозит движение грузоподъемного устройства при превышении нормы высоты или веса поднимаемого груза.
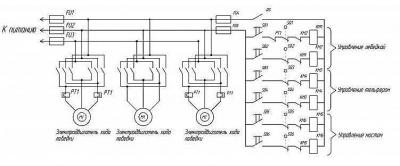
Распределительная эл. схема кран-балки показывает энергораспределение питания на узлы подъемного устройства. При помощи специальных распределителей ток подается под нужным напряжением к каждому рабочему механизму. За это отвечают специальные аппараты регулировки, соединенные с электрическим двигателем при помощи гибкого кабеля или троллеи.

На электронной схеме кран-балки рубильники и включатели отображаются как система пускателей для управления. В натуральную величину они представляют собой программные коробки с кнопками, задающими движение грузового троса: вверх, вниз, вперед, назад. Кожух выполняется из эбонитовой или пластмассовой оболочки, не пропускающей электрический ток.
Принципиальная электрическая схема мостового крана и грузоподъемного оборудования любого типа разрабатывается исходя из назначения устройства. Принципы соединения двигателя и грузоподъемного устройства закладываются на стадии проектирования, после которого начинается производство.
Стандартным напряжением для подъемно-транспортного оборудования считается напряжение 380 В. Это позволяет не только обеспечить работу крана, но и предохранителей и систем безопасности. Часто схема управления делается с расчетом на подачу команд с пола с помощью радиопульта или гибкого кабеля.
В результате оператор сможет находиться на приличном расстоянии от грузоподъемной машины.
Онлайн журнал электрика
Статьи по электроремонту и электромонтажу
Навигация по записям
Электропривод электрических талей и кран-балок
 Навесные электротележки (электрифицированные тали, тельферы и кран-балки) используют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах снутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что уменьшает размеры промышленных построек, а их сервис не просит квалифицированного персонала.
Навесные электротележки (электрифицированные тали, тельферы и кран-балки) используют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах снутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что уменьшает размеры промышленных построек, а их сервис не просит квалифицированного персонала.
Навесные электротележки созданы для подъема и перемещения грузов на производственных объектах по строго определенному пути.
Навесная электротележка (рис. 1) состоит из 3 главных частей: грузоподъемного механизма (электроталь), созданного для подъема (опускания) и удержания груза, механизма передвижения (ходовая телега), созданного для перемещения поднятого груза в строго определенном направлении, монорельса, определяющего горизонтальное движение в 2-ух направлениях.

Рис. 1. Кинематическая схема навесной электротележки
Электроталъ смонтирована на ходовой телеге и включает последующее оборудование: электродвигатель (5) подъемного механизма, редуктор (10) цилиндрический, для понижения частоты вращения электродвигателя до величины, обеспечивающей заданную линейную скорость подъема (опускания) крюка, электрический тормоз (9), для затормаживания вала мотора при выключении его от сети либо исчезновения напряжения в сети, применяется колодочный тормоз, работающий от усилия пружин при охвате вала колодками, выключатель конечный (7) крюка, для ограничения подъема крюка, при нажатии на него движок отключается от сети и затормаживается, барабан канатный (6), для сматывания (разматывания) и хранения каната, крюк (8), для крепления поднимаемого груза.
Ходовая телега смонтирована на монорельсе (3), опирается ходовыми колесами на нижние полки двутавровой балки. Привод на колеса через цилиндрический редуктор (11) от электродвигателя (2).
Монорельс — двутавровая опора с конечными выключателями (4) на концах, для ограничения горизонтального хода.
Электроталь ТЭП-1 (грузоподъемность 1 т, напряжение 380 В) состоит из устройств подъема и передвижения с персональными электроприводами. Рабочий барабан 2 приводится движком 20 через планетарный редуктор, образованный из сателлитов 5, 7, 8, блочных шестерен 13, солнечных шестерен 6, 9, водил 14, 15. Главный приводной вал 4 при отключенном движке затормаживается дисками 10 под действием пружины 11.
Для привода механизма подъема груза со скоростью 6,5 — 6,9 м/с применяется асинхронный движок с завышенным скольжением типа АОС-32-4М (мощность 1,4 кВт при 1320 об/мин и ПВ = 25%). Движение крюка ввысь ограничивается конечным выключателем.

Рис. 2. Электропривод электротали ТЭП-1: 1 — рабочий барабан, 3 — полый вал, 4 — рабочий вал, 5, 7, 8 — сателлиты, 6, 9, 15 — солнечные шестерни, 10 — диски тормозов, 11 — тормозная пружина, 12 — электромагниты, 13 — блочные шестерни, 14, 16, 21 — водила, 17 — трос, 18 — подвеска, 19 — крюк, 20 — электродвигатель подъема груза, 22 — электродвигатель телеги, 23, 24 — шестерни, 25 — каток, 26 — монорельс.
На рисунке 3 показаны рабочие свойства тали. КПД электротали растет до 0,58 с повышением массы поднимаемого груза до 1000 кг.
Увлекателен режим работы мотора 4 при опускании груза: пока масса груза наименее 425 кг, электродвигатель работает в двигательном режиме, а когда масса выше 425 кг — в генераторном. Как следует, для преодоления момента холостого хода механизма подъема достаточен груз массой 425 кг.

Рис. 3. Рабочие свойства электронной тали: 1 — со s фи электродвигателя, 2 — мощность электродвигателя при подъеме груза, 3 — КПД, 4 — мощность электродвигателя при опускании груза.
Для привода ходовой телеги электротали использован асинхронный электродвигатель 22 (рис. 2) типа ТЭМ- 0,25 (мощность 0,25 кВт при 1410 об/мин и ПВ = 25%) со интегрированным планетарным одноступенчатым редуктором и шестеренчатой передачей 23, 24, передающей вращение на катки 25. На механизмах передвижения простых талей тормозные устройства не устанавливают. Передвижение тали по опоре в обе стороны ограничивают механические упоры.
 Кран-балка отличается от тали тем, что опора, по которой передвигается таль, может передвигаться повдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым либо фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Кран-балка отличается от тали тем, что опора, по которой передвигается таль, может передвигаться повдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым либо фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Для привода навесных электротележек используются трехфазные асинхронные движки с короткозамкнутым ротором и только при большой грузоподъемности и необходимости регулирования скорости и плавной «посадки» грузов — асинхронные движки с фазным ротором.
Из-за отсутствия низкой скорости, нужной для плавной посадки грузов либо четкой остановки кран-балки, рабочему приходится временами включать и отключать электродвигатели, а это наращивает число включений и вызывает нагрев обмоток, также понижает износостойкость контактов. Потому на неких кран-балках имеются электроприводы подъема и передвижения с 2-мя рабочими скоростями: номинальной и пониженной, которые обеспечиваются внедрением двухскоростных асинхронных движков заместо односкоростных либо дополнительного микроривода.
 Навесноыми электротележками с маленький скоростью перемещения (0,2 — 0,5 м/с), имеющими привод от движков с короткозамкнутым ротором, обычно управляют с уровня пола (земли) с помощью навесных кнопочных станций. В навесных телегах и кран-балках с кабиной для оператора (при скорости движения 0,8 — 1,5 м/с) движками с фазным ротором управляют при помощи контроллеров.
Навесноыми электротележками с маленький скоростью перемещения (0,2 — 0,5 м/с), имеющими привод от движков с короткозамкнутым ротором, обычно управляют с уровня пола (земли) с помощью навесных кнопочных станций. В навесных телегах и кран-балках с кабиной для оператора (при скорости движения 0,8 — 1,5 м/с) движками с фазным ротором управляют при помощи контроллеров.
Электродвигателями талей и кран-балок управляют с помощью реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле. Напряжение к катушкам и контактам контакторов подъема КМ1 (рис. 4), спуска КМ2, передвижения вперед КМЗ и вспять КМ4 подводится через автоматический выключатель и кабель либо контактные провода. Движение подъемного устройства ввысь ограничивает конечный выключатель SQ .

Рис. 4. Схема электронная принципная кран-балки
Блокировка реверсивных контакторов движков от одновременного включения осуществляется двухцепными клавишами и механической блокировкой самих контакторов (либо размыкающими блок-контактами контакторов).
На электроталях и кран-балках не используют шунтирование пусковых кнопок надлежащими замыкающими блокировочными контактами контакторов, предотвращая возможность продолжения работы тали после отпускания оператором навесной кнопочной станции. Сразу с движком подъема врубается электромагнит УА, размыкающий тормоз.
Очень допустимое время запуска для устройств подъему составляет 3 — 5 с, для устройств передвижения — 10 — 15 с.
Сможете поглядеть также: Электрическое оборудование и схемы электронных талей
Режим работы движков навесных электротележек, электроталей и кран-балок находится в зависимости от их предназначения. Если грузы перемещают к мостовым кранам на маленькие расстояния, то движки работают в позорно-кратковременном режиме (к примеру, у тележек, обслуживающих участки цехов либо складов).
Для кран-балок транспортирующих грузы по местности завода на относительно огромные расстояния, режимы работы движков подъема и перемещения различны: для первых характерен краткосрочный режим, для вторых — долгий. Мощность движков подъема и перемещения электроталей, тельферов и кран-балок определяется так же, как для движков устройств мостовых кранов.